
拥有强大的硅光自动化软件、硬件集成方案

支持 O-O、O-E、E-O 和 E-E 多种测试应用

提供单光纤到光纤阵列的先进测试技术

解决从垂直耦合到端面耦合带来的挑战


F1 机械移动指标
序号 | 项目 | 载物台移动能力 | |||
X 轴 | Y 轴 | Z 轴 | Theta 轴 | ||
1 | 行程 | 301 mm | 301 mm | 20 mm | 10° |
2 | 定位最高精度 * | ≤ 0.05 μm | ≤ 0.05 μm | ≤ 1μm | ± 0.003° |
3 | 速度 ** | ≥ 50 mm/s | ≥ 50 mm/s | / | |
| 4 | 最大速度 | 150 mm/s | 150 mm/s | 35 mm/s | / |
5 | 晶圆不平整度适配能力 * | 100 μm | |||
6 | Mapping 移动平均时间 *** | 最小值 | 典型值 | 最大值 | |
< 500 ms | < 1 s | < 3 s **** | |||
7 | XY 位置锁定 ***** | 最小值 | 典型值 | 最大值 | |
0.02 μm | 0.038 μm | 1.5 μm | |||
8 | Z 位置锁定 | 最小值 | 典型值 | 最大值 | |
0.65 μm | 3.5 μm | 15 μm | |||
* 开启 C0 和 VR 的情况下
** F1 载物台的移动速度,会因客户选择的 Chuck 大小、Chuck 结构(Coax 或 Triax)以及 Chuck 是否支持高低温而存在差异
*** 该时间仅为机械移动时间,不包含对位时间。不同器件大小、不同移动精准度、不同稳定性要求下会有一定差异
*** 高速度和高稳定性无法同时满足,Eoulu 可根据客户的芯片和测量应用,提供测试精度优化或测试速度优化的服务选项。详情请联系销售,获取硬件及软件升级方案
**** 在 8 寸、常温、Triax Chuck 的情况下,F1 选用最高精度和最稳速度模式,1000 μm * 1000 μm 芯片移动时间
***** 根据配置和客户对精度速度的要求会有一定差异。XY 位置锁定的最小值需通过选配 CCD 来实现,标准款 CCD 无法达到
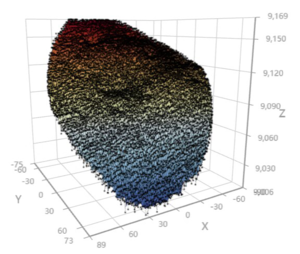
****** 针痕长度的标准差 σ ≤ 5 μm,可参考 Eoulu 的 futureD 产品数据,实测 8 寸晶圆超过 2000 个 DUT,在高精度跑片模式下,DUT 到 DUT,扎针针痕长度差保证在 3σ 内
****** 针痕起始位置标准差 σ ≤ 8 μm,可参考 Eoulu 的 futureD 产品数据,实测 8 寸晶圆 2000 个 DUT,在高精度、低速度跑片模式下,DUT 到 DUT,起始位置差保证在 3σ 内
****** 以上数据指标不低于同行水平,可参考同行 2022 年 8 月 22 日公开发布文章
F1 屏蔽能力
序号 | 屏蔽和噪声能力 * | |
1 | 光屏蔽 | ≥ 150 dB ** |
2 | EMI 屏蔽 | ≥ 20 dB 0.5-20 GHz (typical) |
3 | 频谱噪音水平 | ≤ -150 dBVrms/rtHz (≤ 1 MHz) |
4 | 系统 AC 噪声 | ≤ 15 mVp-p (≤ 1 GHz) |
* 除系统能力外,还要考虑环境条件,此项目不在客户端验证,可以安排到 Eoulu 苏州实验室验证
* F1 全自动探针台目前不带 Microchamber,该项参数不适用
** 单光子测试需额外增加屏蔽装置,该项参数不适用
** 该实验测试光路是指从显微镜正上方 90° 垂直入射光
** 光屏蔽波长为 200 ~ 2000 nm
F1 防震能力
| 序号 | 防震能力 * | |
| 1 | 垂直固有频率 | 2.5 ~ 2.7 Hz |
| 2 | 水平固有频率 | 2.0 ~ 4.5 Hz |
| 3 | 垂直阻尼(可调节) | 6% ~ 20% |
| 4 | 水平阻尼 | 5% ~ 6% |
| 5 | 供气压力 | 0.3 ~ 0.5 Mpa |
| 6 | 最大承重 | 1600 kg |
| 7 | 隔振效率 | 5% ~ 6% |
| 8 | 受外界激励时反应时间 | < 1 s |
| 9 | 防震级别 | VC-C |
* F1 防震台相关参数,请参考厂家溯源指标,此项目不在客户端验证
F1 显微镜
显微镜桥架 | |||||
| 序号 | 项目 | X 轴 | Y 轴 | Z 轴 | |
1 | 行程 | 50 mm | 50 mm | 90 mm | |
2 | 最大可达定位精度 | ± 2 μm | ± 2 μm | ± 2 μm | |
3 | 速度 | 60 mm/s | 60 mm/s | 120 mm/s | |
显微镜 * | |||||
序号 | 项目 | Large FOV | High Resolution | ||
4 | 放大倍率典型范围 ** | 225 倍 | 500 ~ 2000 倍或更高 | ||
| 5 | 典型光学镜头分辨率 *** | 3.0 μm | 1.5 μm 或更小 | ||
| 6 | 实物图 |
|  | ||
7 | futureI 图像 |
| 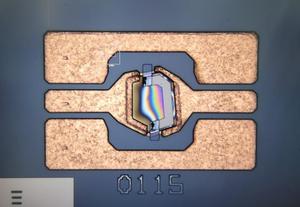 | ||

* F1 探针台提供 Large FOV 和 High Resolution 2 种显微镜配置,请您根据测试需求进行选择
** 根据 CCD 配置会有不同倍率和颜色等差别
** 根据物镜配置不同(5X、10X、20X、50X、100X),放大倍率会有差别
*** 根据镜头配置会有不同的分辨率
F1 载物台
序号 | 项目 | 大小 | ||||
8英寸 | 12英寸 | |||||
1 | 温度 | 室温 | 高低温 | 室温 | 高低温 | |
2 | 最大可工作温度范围 * | - | -60 ~ 300°C | - | -60 ~ 300°C | |
| 3 | 高低温常见可选温度范围 ** | - | -60 ~ 150°C -60 ~ 200°C -60 ~ 300°C -40 ~ 150°C -40 ~ 200°C -40 ~ 300°C 0 ~ 100°C 0 ~ 200°C 室温~ 150°C 室温~ 200°C 室温~ 300°C | - | -60 ~ 150°C -60 ~ 200°C -60 ~ 300°C -40 ~ 150°C -40 ~ 200°C -40 ~ 300°C 0 ~ 100°C 0 ~ 200°C 室温~ 150°C 室温~ 200°C 室温~ 300°C | |
4 | 温度精准度 | ± 1°C | ± 1°C | |||
5 | 温度分辨力 | 0.1°C | 0.1°C | |||
6 | 常温常压 Triax Chuck 漏电 | 标准款:≤ 132 fA 低漏电款:≤ 65 fA | 标准款:≤ 231 fA 低漏电款:≤ 65 fA | |||
| 7 | 常温常压 Triax Chuck 噪声 | 标准款:≤ 30 fA 低漏电款:≤ 16 fA | 标准款:≤ 42 fA 低漏电款:≤ 16 fA | |||
8 | 制冷模式 | 液冷和气冷可选 | ||||
9 | 液冷温控制冷和加热时间 *** (典型经验值) | - 60°C → 25°C:23 min 25°C → 300°C:28 min 300°C → 25°C:25 min 25°C → - 60°C:37 min | - 60°C → 25°C:23 min 25°C → 300°C:28 min 300°C → 25°C:25 min 25°C → - 60°C:37 min | |||
| 10 | 气冷温控制冷和加热时间 *** (典型经验值) | - 60°C → 25°C:9 min 25°C → 300°C:25 min 300°C → 25°C:12 min 25°C → - 60°C:29 min | - 60°C → 25°C:9 min 25°C → 300°C:25 min 300°C → 25°C:12 min 25°C → - 60°C:29 min | |||
11 | 最大加热功率 | 5.5 kW | ||||
12 | 最大制冷功率 | 12.5 kW | ||||
13 | 最大冷媒输运速度 | 5 m/s | ||||
14 | 最大输运压力 | 4 bar | ||||
15 | 最大耐压(高功率特殊选项)**** | 10000 V | ||||
16 | 最大耐流(高功率特殊选项)**** | 800 A | ||||
| 17 | 使用申明 |
| ||||
| 18 | 安全申明 |
| ||||
| 19 | 清洁 |
| ||||
| 20 | 维护 |
| ||||
| 21 | 保养 |
| ||||
22 | Eoulu 高性能温控Chuck |
|
| |||


* 用户可根据测试需求,在此温度范围内进行选择
** 如有其它温度范围需求,请联系 Eoulu 销售
** 温度范围越大,购买成本越高;室温以下的测试需制冷,温度越低,购买成本越高。请按实际测试要求选择合适温度范围
** 高低温完整晶圆跑片,需配置全自动定位器
*** 在温度 20°C~24°C、湿度 40%~50% 环境下的实测值
**** 高压高流不能同时达到
**** 更高电压或更高电流,请联系 Eoulu 定制
F1 控制软件 future interface ( futureI )
序号 | 项目 | futureI 功能 | |
1 | 单页面操作 | 是 | |
2 | 自动对焦 | 包含 | |
3 | 两点对齐 | 包含 | |
4 | 自动对齐 | 包含 | |
| 5 | AutoZ | 包含 | |
| 6 | 高速 AutoZ | 选配 | |
7 | 双舵操作 * | 显微镜和载物台移动 | |
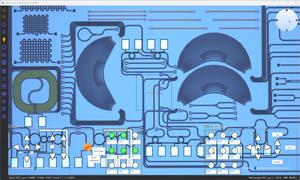
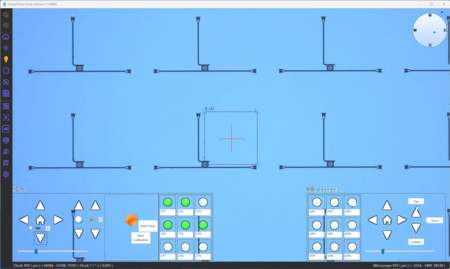
8 | futureI 实物界面 * |
| |
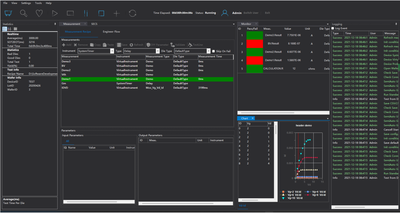
9 | futureI 与 Eoulu 测试软件 futureC 无缝连接 让测试更加简单 * |
|
|
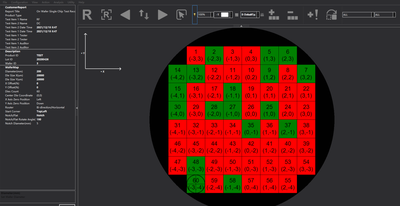
10 | futureI 与 Eoulu 数据软件 futureD 无缝连接 让数据处理更加简单 * |
|
|
* Eoulu 著作权
F1 硅光系统配件
序号 | 名称 | 特点 | 图片 |
1 | 硅光校准辅助 Chuck | • 先进的校准技术,实时校准 • 支持单光纤校准 • 支持 Fiber Array 校准 |
|
2 | 高低温 Tophat | • 支持高低温测试 • 温度范围:-40°C ~ 125°C |
|
3 | 光纤夹具 | • 支持端面耦合 • 支持垂直耦合 • 提供多角度垂直光纤夹具:8°~ 20° |
|
4 | 芯片夹具 | • 可定制化 • 兼容性强,匹配不同芯片尺寸 |  |
5 | 耦合用光电探测器 |
|  |



F1 硅光校准软件
序号 | 名称 | 特点 | 图片 |
1 | AutoCal 校准软件 | • 六轴校准 • 压电三轴校准 • 光纤端校准 • 光纤垂直距离校准 • 一键自动校准,简化操作,降低培训成本 • 精确定位,快速校准,减少测试周期 • 支持无 Capsensor 校准 • 典型自动校准时间 ≤ 5 min |
|
.png")
F1 高精度双边光纤对准系统 *
序号 | 项目 | A-005 | 单位 | |||
1 | 活跃轴数量 | 18 | - | |||
主动驱动轴粗定位 | ||||||
2 | 活跃轴 | X, Y, Z, θX, θY, θZ | - | |||
3 | X, Y, Z 移动范围 ** | ± 6.5, ± 16, ± 8.5 | mm | |||
4 | θX, θY, θZ 移动范围 ** | ± 14.5, ± 10, ± 10 | ° | |||
5 | X, Y, Z最小移动增量 | 0.1 | μm | |||
6 | X, Y, Z 方向最大速度 | 10 | mm/s | |||
7 | 传感器类型 | 增量式旋转编码器 | - | |||
8 | 驱动类型 | 无刷直流电机 | - | |||
压电驱动轴精准定位 | ||||||
9 | 活跃轴 | X, Y, Z | - | |||
10 | X, Y, Z 移动范围,闭环 | 100 | µm | |||
11 | 最小移动增量,开环 | 0.3 | nm | |||
12 | 最小移动增量,闭环 | 2.5 | nm | |||
13 | 线性误差,适用于整个行程范围 *** | 2 | % | |||
14 | 重复性(双向) 10% 行程范围 | 2 | nm | |||
15 | 传感器类型 | 增量式线性编码器 | - | |||
16 | 驱动类型 | PICMA® | - | |||
对准 | ||||||
17 | 螺旋区域扫描时间 @ Ø500 μm **** | < 5 | s | |||
18 | 螺旋区域扫描时间 @ Ø100 μm **** | < 1 | s | |||
19 | 螺旋区域扫描时间 @ Ø10 μm **** | < 0.5 | s | |||
20 | 采用梯度扫描进行优化,随机偏差± 5 µm (重复性< 0.01 dB) ***** | < 0.3 | s | |||
其他参数 | ||||||
21 | 工作温度范围,机械部分 | 0 ~ 50 | °C | |||
22 | 工作温度范围,控制器部分 | 5 ~ 40 | °C | |||
23 | 线缆长度 | 2 | m | |||
光功率计要求 | ||||||
24 | 输出信号 | 模拟输出 | - | |||
25 | 最大输出电压范围 | - 5 ~ 5 | V | |||
26 | 最小带宽 | 1 | kHz | |||
27 | 最大噪声等级 | -60 | dBm | |||
* 相关参数,请参考厂家溯源指标,此项目不在客户端验证
** 单个坐标(X, Y, Z, θX, θY, θZ)的最大行程范围是相互关联的,表中每个轴的最大行程范围,是当其他轴处于标称行程范围的零位并且使用默认坐
标系时,即枢轴点设置为(0, 0, 0)的情况下。改变枢轴点位置会减小 θX, θY, θZ 的行程范围,改变坐标系的方向会改变 X, Y, Z 的行程范围
*** 不包含多项式线性拟合
**** 全区域扫描并移动到光耦合强度最高点的典型时间
***** 在耦合到第一束光后达到扫描区域内最大光功率耦合点
六轴控制器 *
序号 | 项目 | C-887.521 |
1 | 输入电压范围 | -5 ~ 5 V |
2 | ADC 分辨率 | 16 bit |
3 | 带宽 | 5 kHz |
4 | 输入阻抗 | 15 kohm |
5 | 接口 | BNC |
6 | 处理器 | Intel Atom dual core (1.8 GHz) |
7 | 参考开关输入 | TTL |
8 | 通讯接口 | TCP/IP |
9 | 指令集 | futureC 指令集 |
10 | 用户软件 | futureC |
11 | 输出电压 | 24 V |
12 | 峰值输出电流 | 6000 mA |
13 | 工作电压 | 24 V (包含电源适配器) |
14 | 最大消耗电流 | 8 A |
15 | 工作温度范围 | 5 ~ 40 °C |
16 | 重量 | 2.8 kg |
* 相关参数,请参考厂家溯源指标,此项目不在客户端验证
六轴定位器 *
序号 | 项目 | H-811K044 | 单位 | 公差 | |||
1 | 活跃轴 | X, Y, Z, θX, θY, θZ | - | - | |||
移动和定位参数 | |||||||
2 | X, Y, Z 移动范围 ** | ± 17, ± 16, ± 6.5 | mm | - | |||
3 | θX, θY, θZ 移动范围 ** | ± 10, ± 10, ± 21 | ° | - | |||
4 | 单执行器设计分辨率 | 10 | nm | - | |||
5 | X, Y 最小移动增量 | 0.1 | µm | typ. | |||
6 | Z 最小移动增量 | 0.05 | µm | typ. | |||
7 | θX, θY, θZ 最小移动增量 | 1 | µrad | typ. | |||
8 | X, Y 回程间隙 | 0.2 | µm | typ. | |||
9 | Z 回程间隙 | 0.06 | µm | typ. | |||
10 | θX, θY 回程间隙 | 4 | µrad | typ. | |||
11 | θZ 回程间隙 | 4 | µrad | typ. | |||
12 | X, Y 重复性 | ± 0.15 | µm | typ. | |||
13 | Z 重复性 | ± 0.06 | µm | typ. | |||
14 | θX, θY 重复性 | ± 2 | µrad | typ. | |||
15 | θZ 重复性 | ± 3 | µrad | typ. | |||
16 | X, Y, Z 轴最大速度 | 10 | mm/s | - | |||
17 | θX, θY, θZ 最大速度 | 250 | mrad/s | - | |||
18 | X, Y, Z 轴典型速度 | 5 | mm/s | - | |||
19 | θX, θY, θZ 轴典型速度 | 120 | mrad/s | - | |||
机械性能 | |||||||
20 | X, Y 刚度 | 0.7 | N/µm | - | |||
21 | Z 刚度 | 8 | N/µm | - | |||
22 | 载荷(底板水平/任意方向) | 5 / 2.5 | kg | max. | |||
23 | 断电夹持力(底板水平/任意方向) | 15 / 2.5 | N | max. | |||
24 | 电机类型 | 无刷直流电机 | - | - | |||
其他参数 | |||||||
25 | 工作温度范围 | 0 ~ 50 | °C | - | |||
26 | 材质 | 不锈钢,铝 | - | - | |||
27 | 重量 | 2.2 | kg | ± 5% | |||
28 | 线缆长度 | 2 | m | ± 10 mm | |||
* 相关参数,请参考厂家溯源指标,此项目不在客户端验证
** 单个坐标(X, Y, Z, θX, θY, θZ)的最大行程范围是相互关联的,表中每个轴的最大行程范围,是当其他轴处于标称行程范围的零位并且使用默认坐
标系时,即枢轴点设置为(0, 0, 0)的情况下。改变枢轴点位置会减小 θX, θY, θZ 的行程范围,改变坐标系的方向会改变 X, Y, Z 的行程范围
纳米定位器控制器 *
序号 | 项目 | E-712K255 |
1 | 活跃轴数量 | 6 |
2 | 处理器 | 基于 PC 端, 600 MHz,实时操作系统 |
3 | 采样率,伺服控制 | 20 kHz |
4 | 采样率,传感器 | 20 kHz |
5 | 控制器类型 | P-I, 两个陷波滤波器 |
6 | 传感器类型 | 电容性 |
7 | 传感器通道数量 | 6 |
8 | 传感器带宽 (-3 dB) | 10 kHz |
9 | 传感器分辨率 | 18 (插值: 20) bits |
10 | 外部同步 | 是 |
11 | 输出电压 | -30 ~ 135 V |
12 | 放大器通道数量 | 8 |
13 | 峰值输出功率/通道 | 25 W |
14 | 平均输出功率/通道 | 8 W |
15 | 电流极限 | 耐短路 |
16 | DAC 分辨率 | 20 bit |
17 | 温度传感器 | 是 |
18 | 通讯接口 | TCP/IP |
19 | 压电/传感器连接器 | Sub-D Mix 25W3 |
20 | 数字输入/输出 | MDR20: 8 × TTL |
21 | 指令集 | futureC 指令集 |
22 | 用户软件 | futureC |
23 | 应用程序接口 | C / C++ / C# / VB.NET / MATLAB / Python, NI LabVIEW 驱动程序 |
24 | 支持功能 | 波发生器,触发 I/O,宏 |
25 | 线性化 | 四阶多项式,DDL 选项(动态数字线性化) |
26 | 工作温度范围 | 5 ~ 40°C |
27 | 过热保护 | 最高 75 °C,电压输出失活 |
28 | 最大功耗 | 225 W |
29 | 工作电压范围 | 100 ~ 240 VAC, 50 ~ 60 Hz |
30 | 输入电压范围 | ± 10 V |
31 | ADC 分辨率 | 18 bit |
32 | 带宽 | 25 kHz |
33 | 输入阻抗 | 150 kohm |
34 | 接口 | LEMO EPG.00.302.NLN |
* 相关参数,请参考厂家溯源指标,此项目不在客户端验证
纳米定位器 *
序号 | 项目 | P-616K001 | 单位 | 公差 |
移动和定位参数 | ||||
1 | 活动轴 | X, Y, Z | - | - |
2 | 开环行程, -20 ~ 120 V | 120 / axis | µm | + 20% / -0% |
3 | 闭环行程 | 100 / axis | µm | + 20% / -0% |
4 | 最小移动增量,闭环 | 2.5 | nm | typ. |
5 | 线性误差,适用整个行程 | 2% | - | typ. |
6 | 双向可重复性 | 2 | nm | typ. |
传感器 | ||||
7 | 传感器类型 | 光学增量传感器 | - | - |
机械性能 | ||||
8 | 刚度 | 0.5 | N/µm | ± 10% |
9 | X, Y, Z 空载谐振频率 | 700 | Hz | ± 10% |
10 | X, Y, Z 负载 30g 时的谐振频率 | 380 | Hz | ± 20% |
11 | 推力能力(任意方向) | 15 | N | max. |
12 | 夹持力;被动(任意方向) | 15 | N | max. |
13 | X, Y, Z 移动平台的最大允许扭矩 | 0.4 | Nm | max. |
驱动性能 | ||||
14 | 驱动类型 | PICMA® P-885.50 | - | - |
15 | 电容 | 1.5 / axis | µF | ± 20% |
16 | 动态工作电流系数 | 1.9 | µA/(Hz x µm) | ± 20% |
其他参数 | ||||
17 | 工作温度范围 | -20 ~ 80 | °C | - |
18 | 材质 | 铝,钢 | - | - |
19 | 尺寸 | 40 × 40 × 40 | mm | - |
20 | 重量(不包含线缆) | 0.13 | kg | - |
21 | 重量(包含线缆) | 0.32 | kg | - |
22 | 线缆长度 | 3 | m | ± 10 mm |
23 | 传感器/驱动器连接 | 传感器: HD D-Sub 26 (f) | - | - |
* 相关参数,请参考厂家溯源指标,此项目不在客户端验证
F1 尺寸和重量
| 序号 | 项目 | 不带机械手 | 带机械手 | ||
| 1 | 典型尺寸 (W x D x H) | ~1500 x 1115 x 1530 mm * | ~2224 x 1506 x 1950 mm ** | ||
| 2 | 最大外围尺寸 (W x D x H) | ~1750 x 1465 x 1600 mm | ~2534 x 1506 x 2000 mm | ||
| 3 | 主要尺寸标注 |  | |||
| 4 | 主要尺寸标注 (单位 mm) | 双边光纤对准系统 | |||
 | |||||
| 5 | 外观图 |  | |||
| 6 | 重量 | 主机 | 高低温温控(液冷) | 高低温温控(气冷) | 机械手 |
| ~ 540 kg | ~ 245 kg | ~ 295 kg | ~ 345 kg | ||
* 该尺寸包含显示器支架、鼠键支架,支架可调,该尺寸仅为典型数值
** 该尺寸包含显示器支架、鼠键支架、三色灯,支架可调,该尺寸仅为典型数值
F1 安装环境要求
| 1 | 安装环境要求 | 安装环境 | • 温度:17℃ ~ 25℃,± 0.5℃ 温度起伏 • 湿度:20% ~ 60% | |
存储环境 | • 温度:10℃ ~ 30℃ • 湿度:≤ 50% • 存储时间:≤ 6 个月(存储超过 6 个月需通电开机 24 小时) | |||
现场要求 | • 水平地板,承重需 ≥ 200 kg/㎡ • 震动 ≤ 100 micrometers/sec,rms (ISO Operating Theatre level) * • 实验室洁净度:普通实验室(需符合本手册中 F1 安装环境和存储环境要求) 推荐放置于万级及万级以上的洁净室 ** | |||
| 2 | 电源要求 | 半自动探针台 | • 探针台:单相 220 VAC(电压偏差 ﹢7%,-10%)***,50/60 Hz,1800 VA,国标 10A 插座 • 显示器、主机、真空泵:单相 220 VAC(电压偏差 ﹢7%,-10%)***,50/60 Hz,1000 VA, 国标 10 A 插座(3 路,可用插排) | |
全自动探针台 | • 探针台:单相 220 VAC(电压偏差 ﹢7%,-10%)***,50/60 Hz,1800 VA,国标 10A 插座 • 显示器、主机、真空泵:单相 220 VAC(电压偏差 ﹢7%,-10%)***,50/60 Hz,1000 VA, 国标 10 A 插座(3 路,可用插排) • 机械手:单相 220 VAC(电压偏差 ﹢7%,-10%)***,50/60 Hz,1000 VA,国标 10 A 插座 | |||
高低温温控系统 | • 温控箱:单相 220 VAC (电压偏差 ﹢7%,-10%)***,50/60 Hz,国标 10 A 插座 • 水冷机:三相 380 VAC (电压偏差 ﹢7%,-7%)***,50/60 Hz,国标 32 A 5 芯航空插座 • 气冷机:三相 380 VAC (电压偏差 ﹢7%,-7%)***,50/60 Hz,国标 32 A 5 芯航空插座 | |||
| 3 | 压缩干燥空气 ****** (CDA) | 常温探针台 | • 气压:4.5 ~ 8 bar (65 ~ 116 psi) • 露点:≤ -20°C • 连接器外径 *****: 半自动探针台:8 mm(CDA 1) 全自动探针台:8 mm(CDA 1)、8 mm(CDA 2) | |
高低温探针台 | 高低温测试 Chuck 不结霜条件: • 气压:4.5 ~ 8 bar (65 ~ 116 psi) ****** • 流量: 液冷温控:≥ 100 l/min @ 4.5 bar 气冷温控:≥ 400 l/min @ 4.5 bar • 露点:≤ -70°C(当最低测试温度为 -60℃ 时) 含油量:≤ 0.01 mg/m³ **** • 连接器外径 *****: 半自动探针台:8 mm(CDA 1) 全自动探针台:8 mm(CDA 1)、8 mm(CDA 2) | |||
| 4 | 真空 ****** | 绝对真空度 | ≤ 0.4 bar @ 10 l/min | |
相对真空度 | ≤ - 0.6 bar @ 10 l/min | |||
流量 | ≥ 10 l/min | |||
连接器外径 ***** | • 半自动探针台:8 mm(VAC 1) • 全自动探针台:8 mm(VAC 1)和 8 mm(VAC 2) | |||
| 5 | 附件选型 | 空压机推荐选型 | 温度范围(液冷温控) | 产品型号 |
室温 | I-001 | |||
-60 ~ 150°C | I-002 | |||
-60 ~ 200°C | ||||
-60 ~ 300°C | ||||
-40 ~ 150°C | ||||
-40 ~ 200°C | ||||
-40 ~ 300°C | ||||
0 ~ 100°C | ||||
0 ~ 200°C | ||||
室温 ~ 150°C | ||||
室温 ~ 200°C | ||||
室温 ~ 300°C | ||||
真空泵推荐选型 | - | K-001 | ||
| 6 | CDA、VAC 连接器位置图 | |||
 | ||||
****** 参照《Generic vibration criteria for vibration-sensitive equipment》
****** 采用国际标准 ISO 14644-1
****** 根据中华人民共和国国家标准 GB/T 156-2007 要求
****** 根据国际标准 ISO8573-1 要求
****** 采用国际标准 ISO 14743:2020
****** 接口 CDA 1、CDA 2、VAC 1、VAC 2 位置,请参考如下 F1 CDA、VAC 连接器示意图
****** 实验室环境为标准环境温度和压力(SATP)下的测量值;更多有关 CDA 气压和流量信息,请咨询 Eoulu 工程师
F1 服务中心 *
服务分类 | 服务内容 | 下单型号 |
硬件服务 (安装) | • 整机安装(量产模式) | SRV-301 |
• 整机安装(分析用模式) | SRV-501 | |
• 配件安装 | SRV-305 | |
• 系统重装 | SRV-306 | |
• 仪表连接 | SRV-307 | |
• 接地服务 | SRV-308 | |
硬件服务 (校准) | • 精度校准 | SRV-503 |
• 温度校准 | SRV-505 | |
• 机械手校准 | SRV-506 | |
硬件服务 (培训) | • 机台操作培训(量产模式) | SRV-303 |
• 机台操作培训(分析用模式) | SRV-502 | |
• 射频校准培训 | SRV-202 | |
• 仪表操作培训 | SRV-203 | |
| 硬件服务 (其他) | • 机台 PM | PM-F1 |
• 机台搬迁 | RELO-F1 | |
• 陪同服务 | SRV-201 | |
软件服务 (安装) | • 现场安装 | SRV-101 |
• 远程安装 | SRV-103 | |
软件服务 (更新) | • 平台功能 | SRV-607 |
• 平台版本 | SRV-606 | |
• 测试脚本 | SRV-608 | |
• 仪表驱动 | SRV-609 | |
• 插件更新 | SRV-701 | |
软件服务 (培训) | • 软件操作 | SRV-605 |
• 驱动开发 | SRV-603 | |
• 脚本开发 | SRV-702 | |
软件服务 (其他) | • 使用咨询 | SRV-706 |
• 异常排查 | SRV-703 | |
• 陪同服务 | SRV-705 | |
| 应用服务 | • IV 测试 | SRV-707 |
• CV 测试 | SRV-708 | |
• RF 测试 | SRV-709 | |
• 硅光测试 | SRV-801 | |
• 蓝膜测试 | SRV-802 | |
• 夹具测试 | SRV-803 | |
• MMIC 测试 | SRV-805 | |
• 跑片扎针 | SRV-806 | |
| 发货服务 | • 加急服务 | SRV-807 |
• 保险服务 | SRV-808 | |
• 卸货服务 | SRV-809 | |
• 专车服务 | SRV-901 | |
• 仓储服务 | SRV-902 | |
• 上楼服务 | SRV-903 | |
• 清理服务 | SRV-905 | |